3D Soft Body Physics Simulation
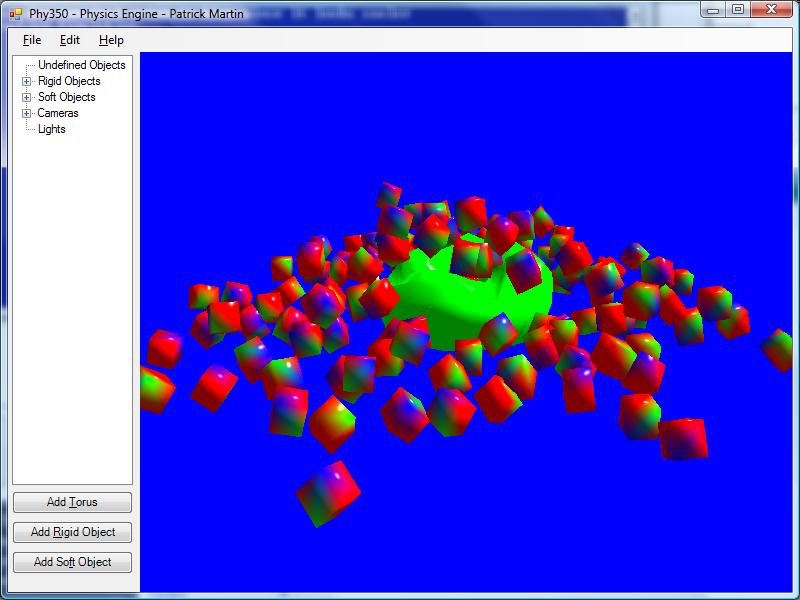
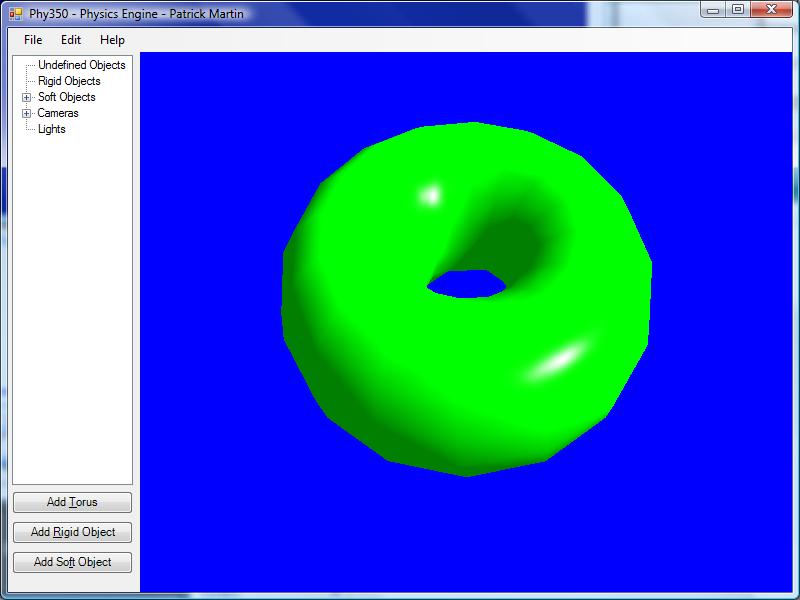
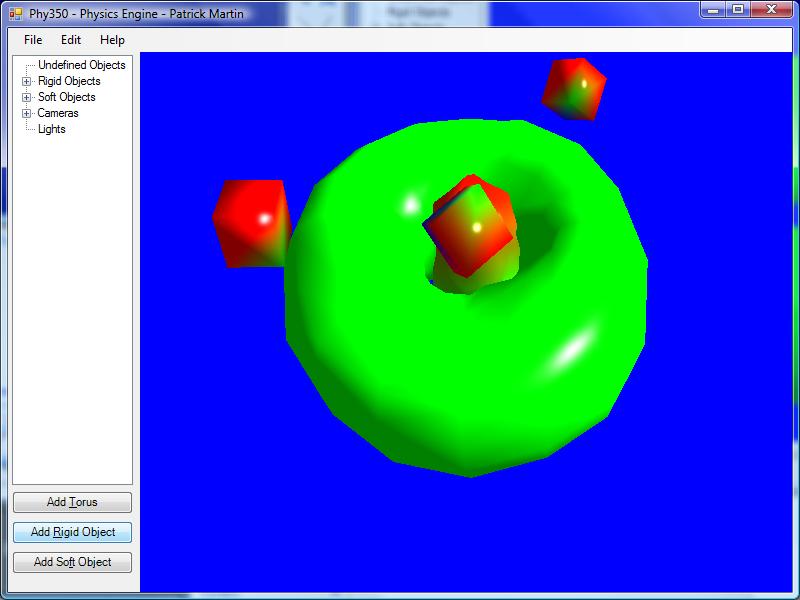
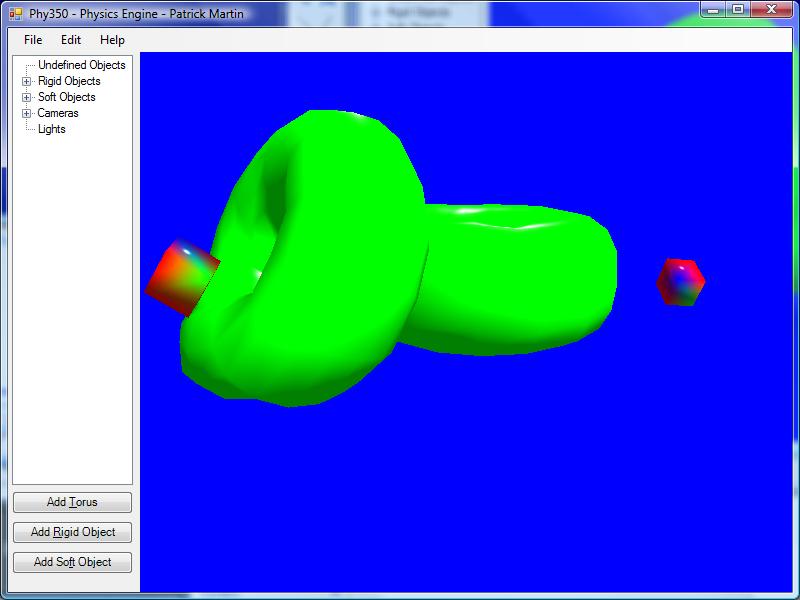
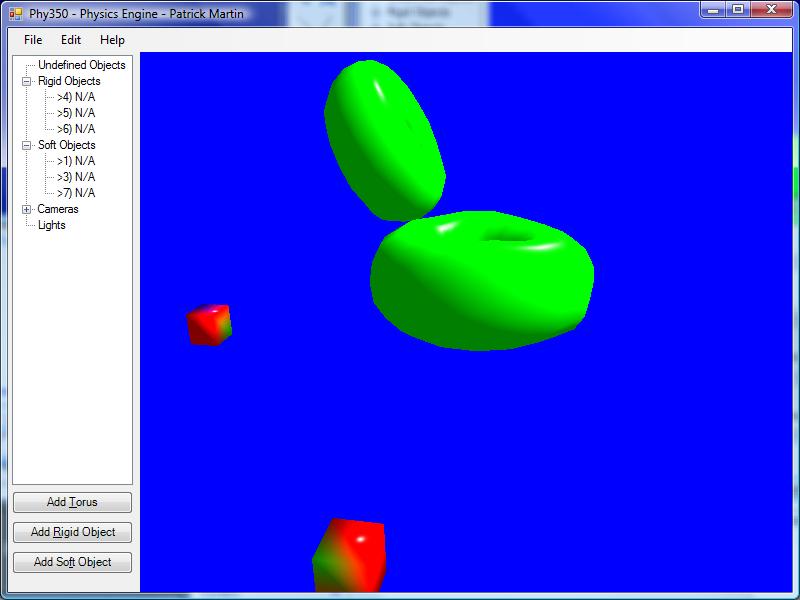
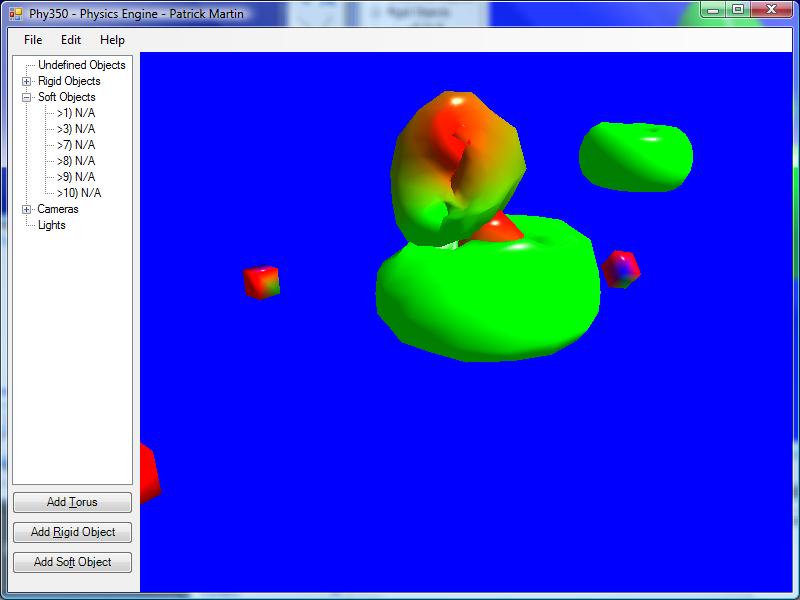
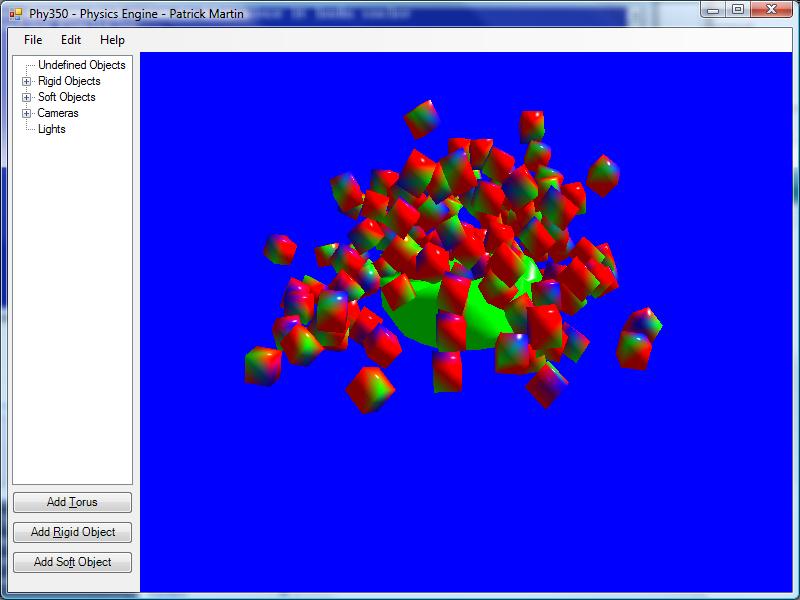
This is my Phy350 final project, a soft body simulation using a simulation of the pressure force. The surface of the object is represented as a mesh of springs, and the 3D shape is created and maintained via air pressure.
Soft body objects use the Runge-Kutta 4 interpolation technique to compute motion. The pressure force is quickly and accurately computed on a per-frame basis using a linear time algorithm. Rigid body objects use an impulse based simulation and the Euler-Cromer integrator.
The physics and graphics engines used in this simulation are written in native C++. A managed C++ shim is used to expose a minimal subset of the underlying simulation to C# and other .NET languages. The frontend user interface is written in C#.
Soft Body Physics – Program and Paper
Real Time Soft Body Simulation Using an Approximation of the Pressure Force
All content (c) 2009 DigiPen (USA) Corporation, all rights reserved.